Multidimensionell materialtransport och bearbetning är avgörande steg inom maskinautomation. Hanteringen av produkter påverkar direkt maskinens cykeltid, vilket gör lastning och lossning till kritiska moment i processkedjan. För att optimera prestandan krävs rörelseprofiler som är snabba, precisa och skonsamma både mot produkterna och maskineriet.
Banstyrning, hantering och kinematik - så sätter du intuitivt idrift robotar
Det är svårt att föreställa sig automationsteknik – särskilt maskinautomation – utan robotar längre. Vi erbjuder en omfattande portfölj för implementering av din applikationsspecifika robotlösning.
Klicka på prickarna här för att ta reda på mer:

- Exekveras på styrenheten
- Ta kontroll över drivningarna
- Är särskilt lätta att idriftsätta, exakta och pålitliga
- Omfattande portfölj för komplett automatisering
- Från rörelsestyrning till högpresterande styrning
- I olika utföranden
- I ett DC-länknät med optimalt energiflöde
- Flexibel i alla avseenden
- Med MOVIDRIVE® modular och Power and Energy Solutions
I åratal har våra motorer och växlar varit kända för sin höga kvalitet och utmattningshållfasthet.
Vårt modulsystem har också något att erbjuda när det kommer till robotar.
- Displayer med integrerade kontroller och knappsatser
- WebVisu för användning med externa enheter
- Omfattande mallar
RobotMonitor är gränssnittet mellan roboten och människan. Detta ger operatören full kontroll.
Omfattande tjänster längs hela livscykeln för ett system kompletterar vår portfölj.
- Drivsystemmekaniken förvandlar elektrisk kraft till dynamisk rörelse.
- Med de synkrona servomotorerna i serien CM3C.. och PxG® planetariska servoväxlar har du de perfekta komponenterna för att göra just detta.
Dynamisk, exakt och skonsam
Typiska tillämpningar för våra robotlösningar inkluderar pick and place, palletering and stapling, transport och överföring samt förpackning. Våra robotlösningar är också idealiska för processer för efterbehandlingsprodukter, såsom dekorering livsmedel och bearbetning i farten. Vid sidan av de högsta kraven på dynamik ska produkter också hanteras så skonsamt som möjligt. Samtidigt är processen bara stabil om material kan bearbetas med hög noggrannhet på ett reproducerbart sätt.
Med till exempel MOVIKIT® Robotics, har vi utvecklat lämpliga programvarumoduler för applikationsområden som dessa. Dessutom finns på hårdvarusidan vår parallel arm kinematics kit för att kunna implementera system med komplexa och snabba rörelsesekvenser. Tillsammans bildar de den idealiska lösningsplattformen med vilken du kan implementera banrörelser lika enkelt och optimalt som att flytta enskilda axlar.
MOVIKIT® Robotics och tilläggen
Inget komplext programmeringsspråk – direkt vid maskinen – helt intuitivt
Programvarumodulen MOVIKIT® Robotics den grundläggande programvaran för att styr en robot Den tillhandahåller ett brett utbud av parametriserbara kinematikmodeller. Den omfattande funktionalitet som redan ingår i grundprogramvaran kan utökas med ett flertal tilläggsprogrammoduler och därmed specialfunktioner.
-
 MOVIKIT® Robotics
MOVIKIT® Robotics
-
 MediumModels tillägg
MediumModels tillägg
-
 LargeModels tillägg
LargeModels tillägg
-
 ConveyorTracking tillägg
ConveyorTracking tillägg
-
 Touchprobe tillägg
Touchprobe tillägg
-
 Circle tillägg*
Circle tillägg*
-
 CollisionDetection tillägg
CollisionDetection tillägg
MOVIKIT® Robotics


I kombination med den integrerade 3D-simuleringen och möjligheten till inlärning erbjuder den parametrerbara programvarumodulen MOVIKIT® Robotics den enklaste möjliga genereringen av rörelsesekvenser. Samtidigt ger modulen ett brett utbud av funktioner och en hög grad av flexibilitet för att implementera din applikation.
MediumModels tillägg

MediumModels-modulen utökar funktionaliteten för att lägga till kinematiska modeller med tre eller fyra ledaxlar, t.ex. Portalrobotar, Rullportaler, SCARA-robotar, Deltarobotar, Tripod eller Quadropod..
Dessutom innehåller expansionsmodulen MediumModels även lämpliga 3D-modeller av kinematiska modeller i MOVISUITE®RobotMonitor och bekväm parametrering av modellerna i MOVISUITE®.
LargeModels add-on

LargeModels-modulen utökar funktionaliteten genom att inkludera kinematiska modeller med fem eller sex ledaxlar, eller minst två orienteringsfrihetsgrader. Detta omfattar portalrobotar, artikulerade armrobotar, stativ och hexapods.
Expansionsmodulen innehåller dessutom detaljerade 3D-modeller av dessa kinematiska system i MOVISUITE® RobotMonitor samt erbjuder smidig parametrering av modellerna i MOVISUITE®.
ConveyorTracking tillägg
ConveyorTracking-tillägget förbättrar MOVIKIT® Robotics funktionalitet genom att möjliggöra interpolation i rörliga koordinatsystem. Detta gör det möjligt för roboten att plocka föremål från ett löpande transportband och placera dem i en statisk miljö eller på ett annat transportband. Roboten synkroniserar först med bandet i det kartesiska koordinatsystemet och anpassar därefter alla rörelser till det rörliga bandet, vilket möjliggör effektiv plockning.
Tillägget stöder även plockning och placering av föremål från eller på ett roterande bord, som kan styras externt eller synkront med roboten. Detta synkrona styrsätt utökar robotens frihetsgrader, vilket till exempel gör det möjligt för en robot med tre frihetsgrader att utföra en fyrdimensionell palleteringsuppgift..
Touchprobe tillägg
Touchprobe-modulen möjliggör exakt mätning av robotens aktuella kartesiska position eller sensorbaserad positionering.
När en sensor aktiveras eller en boolesk variabel ändras i robotprogrammet, registreras robotens faktiska position i det kartesiska systemet.
Detta kan utlösa en definierad åtgärd, som exempelvis att färdas en specifik återstående sträcka från den uppmätta punkten på robotens programmerade väg.
Touchprobe-funktionen är särskilt användbar vid palletering eller depalletering där delarnas höjd är variabel eller okänd, samt vid andra sensorbaserade åtgärder.
Översikt över funktioner:
- Touchprobe-funktioner: Mätning och sensorbaserad positionering
- Flexibilitet: Registrering och avregistrering av Touchprobe-funktionen när som helst under rörelsebanan
- Flera registreringar: Möjlighet till flera mätningar i ett robotprogram
- Parametrering: Anpassning av händelsekälla, kant, upprepning av händelser och mätriktning
- Diagnostik: Omfattande diagnostik genom registrering, aktivering av avtryckare och Touchprobe-position i robotprogrammet samt 3D-simulering
Denna modul förbättrar precisionen och flexibiliteten i robotens arbete, vilket är avgörande för komplexa och varierande uppgifter.
Circle tillägg*
Circle-tillägget utökar funktionerna i MOVIKIT® Robotics genom att introducera möjligheten till cirkulär interpolation. Cirkelsegmenten kan parametriseras på flera sätt för att möta olika behov:
- Cirkelcentrum och vinkel
- Cirkelcentrum och slutpunkt för cirkelsegmentet
- Mellanpunkt på cirkelsegmentet och slutpunkt för cirkelsegmentet
- Radie och vinkel
- Radie och slutpunkt för cirkelsegmentet
*Obs: Funktionen är under utveckling.
CollisionDetection tillägg
Att använda CollisionDetection-tillägget innebär att du inte behöver investera i dyr sensorteknik för verktyget eller armleder. Genom denna expansionsmodul kan du tillförlitligt identifiera potentiella kollisioner på verktyget och andra mekaniska delar av roboten. Detta uppnås genom att kontinuerligt jämföra robotens faktiska status med dess målstatus enligt en dynamisk modell.
Kollisionsreaktioner, såsom snabbt nödstopp, kan konfigureras i förväg eller integreras direkt i rörelseprogrammet med hjälp av parametrerbara kommandon.
Dr. Markus Müller, Application Software MOVIKIT® Robotics
Vad vi kallar standard, kallar andra anpassat
"Oavsett om du planerar att använda SCARA, portal, ledad arm eller deltarobot i din applikation, så använder vi vår standardproduktportfölj för att designa skräddarsydda lösningar för en mängd olika robotkinematiska modeller. Våra innovativa drivsystem- och automationslösningar finns i nästan alla sektorer och tillämpningar över hela världen, från förpackningsindustrin, biltillverkning, materialproduktion och metallindustrin till livsmedels- och dryckesindustrin."
Kinematiska modeller, HMI och automation
Med den standardiserade mjukvarumodulen MOVIKIT® Robotics, kan du enkelt och tidsbesparande styra olika robotkinematiska modeller.
Operationen kan utföras
- Via MOVISUITE® RobotMonitor
- Via MOVISUITE® RobotMonitor, det standardiserade eller anpassningsbara processdatagränssnittet
- eller från ditt IEC-program
Vill du kunna utföra startproceduren offline på ditt kontor eller testa din maskin med simulerade axlar? Tack vare de integrerade, adaptiva 3D-simuleringarna av roboten och dess vägar i MOVISUITE® RobotMonitor, finns ett brett utbud av alternativ tillgängliga för dig.
Kinematiska modeller – liknande, men aldrig exakt likadan
Det finns många olika robotapplikationer som innebär en mängd olika utmaningar när det gäller rörelser. Du vet bäst vilket axelarrangemang som passar bäst för din aktuella tillämpning. Vi ser till att du kan konfigurera och styra ditt mekaniska system enkelt med på en grafisk plattform.
Med MOVIKIT® Robotics täcker SEW-EURODRIVE ett brett spektrum av kinematiska modeller av olika typer och utökar kontinuerligt vår portfölj. Du berättar om dina mekaniska komponenter, och vi erbjuder skräddarsyddalösningar med våra standardiserade SEW-EURODRIVE-moduler.
Arbetsomslutning, dynamik, bärförmåga och konstruktionskomplexitet är nyckelparametrar för att välja rätt kinematisk modell. MOVIKIT® Robotics stöder alla kinematiska modeller i många utföranden, inklusive specialanpassningar som går utöver standardmodellerna.
Har du utvecklat en speciell kinematisk modell för din applikation? Kontakta oss gärna så hjälper vi dig!
-
 Gantries
Gantries
-
 Rullbanor
Rullbanor
-
 SCARA- robotar
SCARA- robotar
-
 Ledarmsrobotar
Ledarmsrobotar
-
 Deltarobotar
Deltarobotar
-
 Tripods
Tripods
-
 Quadropods
Quadropods
-
 Hexapods
Hexapods
Gantry-robotar

Gantry-robotar erbjuder ett stort arbetsområde och används flitigt på grund av sin linjära konstruktion. De är också kapabla att dynamiskt hantera tunga laster.
Rullbanor

Rullbanor har fördelen att drivenheterna är installerade i ett stationärt läge. Detta gör det möjligt att betydligt minska rörliga massor och kablage.
SCARA- robotar
SCARA-robotar kännetecknas av en mekanisk design som är kompakt men ändå enkel jämfört med banor.
Ledarmsrobotar

Ledarmsrobotar erbjuder maximal flexibilitet tillsammans med ett relativt stort arbetsområde.
Deltarobotar

Deltarobotar har fördelen att drivenheterna installeras i ett stationärt läge. De används ofta på grund av sin robusta design.
Tripods

Tripods används när en hög nivå av dynamik krävs. Ofta delar flera tripods på hanteringen vid transportband.
Quadropods

Quadropods används ofta som kabelrobotar i mycket stora arbetsområden.
Hexapods

Hexapods kan flytta tunga laster med hög precision i sex dimensioner.
Din mekatroniska kinematiklösning som en monteringssats

Industriella tillverkare efterfrågar allt högre flexibilitet, precision och tidseffektivitet. De uppskattar att kunna få pålitliga moduler och support direkt från en enda tillverkare.
SEW-EURODRIVE är den idealiska partnern för detta. Vi automatiserar kinematiklösningar med ett mekatroniskt delsystem som fungerar som ett kit för kinematikrobotar med parallella armar.
Våra MAXOLUTION® kinematiksatser för parallella armar består av styrenhet, axlar och mekaniska paket. Dessa integreras enkelt i maskinapplikationer eller som autonoma lösningar i produktionsprocesser, samt kan användas som fristående enheter.
Den modulära strukturen och den oberoende designen av systempaketen gör att du kan uppnå perfekt koordinerad kinematik med bara några få steg. Dessutom möjliggör den parametrerbara mjukvarumodulen MOVIKIT® Robotics en snabbare och enklare idrifttagning.
Simulering av krafter och vridmoment

MOVIKIT® Robotics mjukvarumodul erbjuder mer än bara möjligheten att visualisera rörelser i förväg i 3D-vy. Den inkluderar även en simulering av de dynamiska egenskaperna med hjälp av angivna dimensioner, massor och robotens tröghetsmoment. Detta gör det möjligt för dig att bedöma kraftkrav och nödvändiga vridmoment för varje enskild led och särskilt för motorerna.
Denna data kan sedan användas i SEW-Workbench, drivenhetskonfigurationsverktyget, för att optimalt designa drivlinan och säkerställa att den uppfyller dina specifika krav. Detta sparar kostnader som annars skulle kunna uppstå på grund av över- eller underdimensionering.
MOVISUITE® RobotMonitor

MOVISUITE® RobotMonitor är användargränssnittet för mjukvarumodulen MOVIKIT® Robotics och dess tillägg.
Det kan användas för att visualisera den parametriserade kinematiska modellen och exekvera den axel för axel eller i det kartesiska systemet i jog-läge, manuellt eller i automatiskt läge. RobotMonitor innehåller också en editor för SEW Robot Language, vilket gör det enkelt att mata in och parametrisera rörelsesekvenser genom inlärning, specifika koordinater eller positionsvariabler.
Upp till 20 program, var och en med flera hundra kommandon, kan definieras som standard. Det finns ingen storleksbegränsning för ytterligare program som kan läggas till. Vid uppstart kan proceduren övervakas i stegläge med hjälp av programpekaren och rörelsepekaren.
RobotMonitor stöds på datorer, knappsatser och surfplattor med Windows-operativsystem, vilket ger användarna samma gränssnitt oavsett vilken enhet de använder.
Översikt över funktioner:
- 1
3D-simulering av den kinematiska modellen:
Möjliggör undersökning av rörelsen från vilken vinkel som helst, även utan drivning på kontoret eller vid simulerade drivningar på maskinen. - 2
Manuellt och automatiskt läge:
Programmet kan köras manuellt i stegläge eller automatiskt. - 3
Hastighetsöverstyrning:
Särskilt användbart under uppstart för att köra med reducerad hastighet. - 4
Knappar för jog-läge:
Tillåter manuell förflyttning av roboten till önskad position. - 5
Editor för SEW Robot Language:
Editorn gör det enkelt att skapa robotprogrammet eller justera standardprogram med hjälp av intuitiva, begripliga instruktioner och grafiskt stödd diagnostik - 6
Information och felvisning:
Tydlig visning av aktuell felstatus och annan användbar information som text.
SEW Robot Language

Slingor, förgreningar och anrop av subrutiner är alla möjliga, liksom inställningen av variabler. SEW Robot Language kan också interagera med IEC-program på lägre nivå, vilket möjliggör utförandet av specialfunktioner där. Du definierar rörelsesekvensen med enkla kommandon som LIN och WAIT och genom att ställa in koordinatsystemet.
Visningar och visualisering

Med ökande utbud av funktioner inom system- och drivteknik, ökar också kraven på drift, visualisering och diagnostik i industrin. SEW-EURODRIVE's visualiseringshårdvara är speciellt utvecklad för att användas i krävande industriella miljöer, direkt intill maskinen.
Vår knappsats möjliggör enkel hantering och inkluderar integrerade säkerhetsfunktioner som nyckelbrytare, nödstopp och bekräftelseknappar. Utöver vår omfattande portfölj av visualiseringslösningar, erbjuder vi lämpliga tillbehör som prefabricerade kablar, monteringsdelar och spänningsmatning – allt från en enda källa.
DOP21C-T70 handterminal:
- 7" TFT WSVGA Display, WSVGA 600 x 1024 pixlar
- Analog resistiv touch – Intel Celeron N2807 2*1.58GHz
- 32GB SSD Flash, 4GB DDR3 RAM
- Nyckelbrytare, två-kanals nödstopp eller två-krets stoppknapp
- Windows 10 IoT Enterprise operativsystem
- SEW RobotMonitor
- MOVIKIT® Visualization flexible
MOVIKIT® AutomationFramework – snabbare till maskinen

MOVIKIT® AutomationFramework erbjuder en standardiserad tillstånds- och lägeshanterare för implementering på alla MOVI‑C® CONTROLLER. Den är kompatibel med PackML, erbjuder definierade gränssnitt som PackTags och använder de definierade lägena och tillstånden.
Grundprogrammet inkluderar en master och en testslav. Fler maskinmoduler kan enkelt läggas till från ett grundprojekt.
Dessutom erbjuder MOVIKIT® AutomationFramework ett antal tilläggsfunktioner, såsom felhantering, recepthantering och en simuleringsmiljö för alla inkommande maskinmoduler och förberedda HMI-moduler.
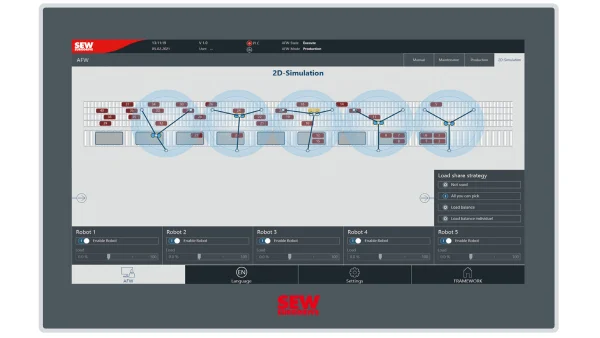
Dina fördelar:
- Följer OMAC-definierad industristandard med PackML (Packaging Machine Language) kompatibilitet
- Tidsbesparingar med förkonstruktion genom 2D/3D-simulering av applikationen
- Mervärde genom ytterligare funktioner såsom förprogrammerad robotspårning med lastbalansering
- Minskar programmeringskostnader genom användning av prefabricerade mjukvarumoduler




![[]](https://media.sew-eurodrive.com/sew_master/media/sew_eurodrive/produkte/movi_c_automatisierungsbaukasten/movi-c-software-235x177-2x.webp)




